





PROJECTS ArduinoSolar In modern solar tracking systems, the solar panels are fixed on a structure that moves according to the position of the sun.
DFRduino UNO R3
Tools:
Stack the I/O Expansion Shield on the Arduino.
Fix the Solar Panel on a cardboard and paste it on the face of upper servo.
Schematics
Sunflower - Arduino Solar Tracker
DFRobot
Nov 21 2017 2687
In modern solar tracking systems, the solar panels are fixed on a structure that moves according to the position of the sun.
Let us design a solar tracker using two servo motors, a light sensor consisting of four mini photocells and Arduino UNO board.

Hardware Components:
DFRduino UNO R3
I/O Expansion Shield for Arduino
DF05BB Tilt/Pan Kit (5kg)
Mini Photocell x 4
Resistor 100kOhm x 4
DFRobot Solar Panel
Software:
Arduino IDE
Tools:
Solder Iron
Assembly of the Pan Tilt
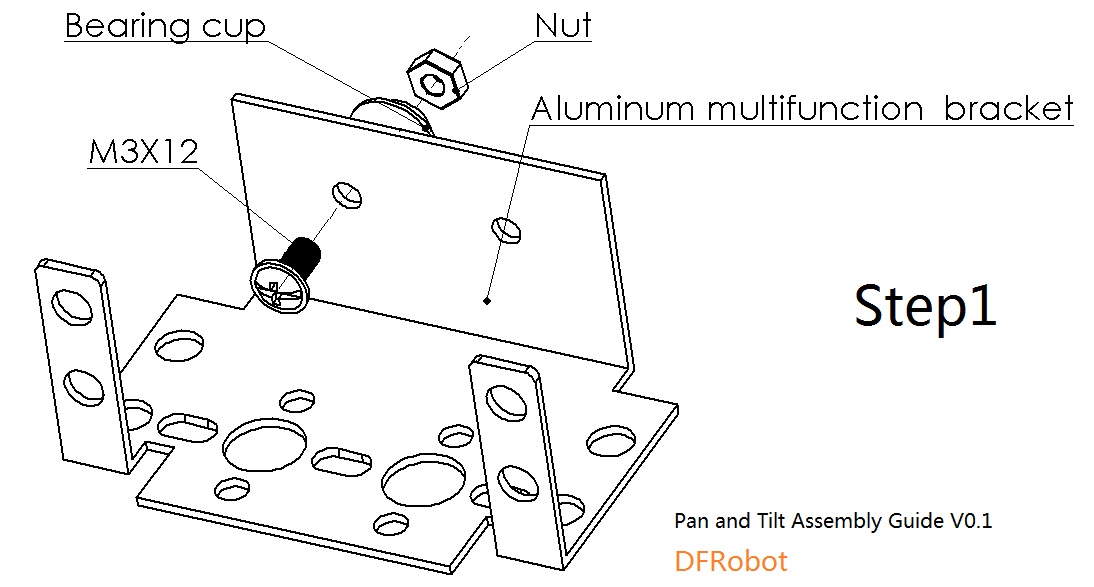
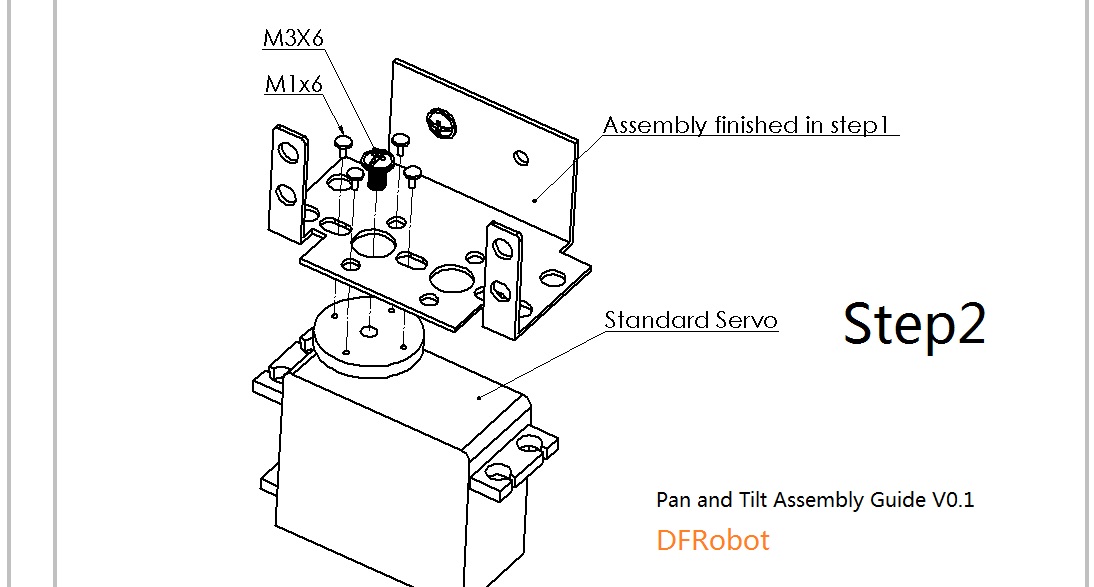
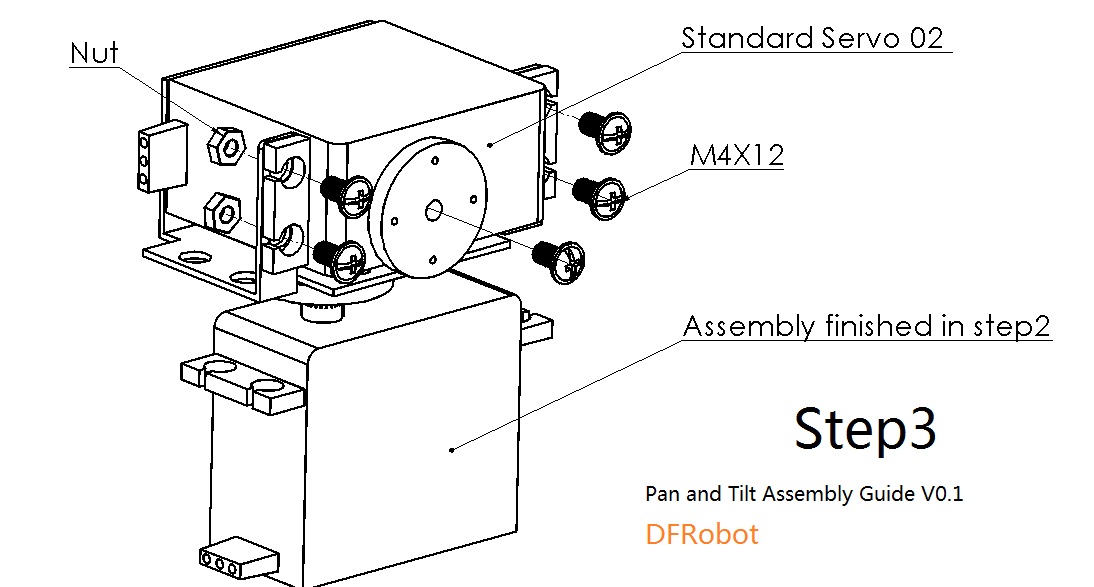

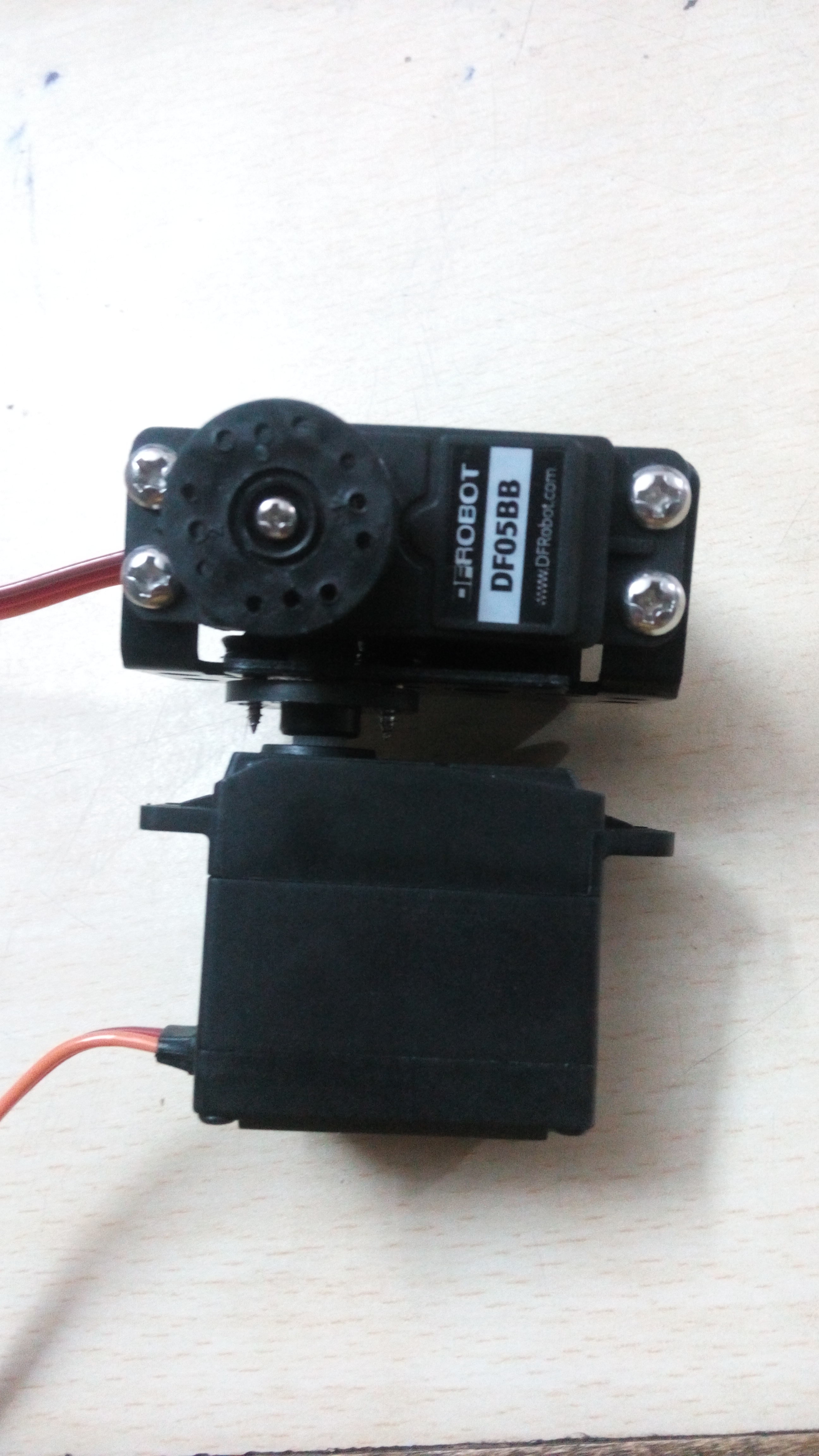
Follow the steps in the images above and assemble the parts.
Remember: Use rubber spacers when using the M1x6.
Connections
Stack the I/O Expansion Shield on the Arduino.
Connect lower servo with D9 in shield.
Connect upper servo with D10 in shield.
Take +5V and GND to power rails in breadboard.
Connect +5V in breadboard to each photocell.
Connect upper left photocell to A0.
Connect upper right photocell to A1.
Connect lower right photocell to A2.
Connect lower left photocell to A3.
Connect GND terminal of each photocell to GND with 10k Ohm resistor in series.
Fixing and Testing

Fix the Solar Panel on a cardboard and paste it on the face of upper servo.
Take out all the wires and give them a play so as to move about 180 degrees.
Put the system on a stable platform.
Upload the code and test it with a bright LED or a bulb.
Schematics
![]()
CODE
#includeServo servohori; int servoh = 0; int servohlimithigh = 180; int servohlimitlow = 0; Servo servoverti; int servov = 0; int servovlimithigh = 180; int servovlimitlow = 0; //Assigning LDRs variables int ldrtopl = 0; int ldrtopr = 1; int ldrbotr = 2; int ldrbotl = 3; void setup() { servohori.attach(10); servohori.write(0); servoverti.attach(9); servoverti.write(0); } void loop() { /* code */ servoh = servohori.read(); servov = servoverti.read(); //capturing analog values of each LDR int topl = analogRead(ldrtopl); int topr = analogRead(ldrtopr); int botl = analogRead(ldrbotl); int botr = analogRead(ldrbotr); // calculating average int avgtop = (topl + topr) / 2; //average of top LDRs int avgbot = (botl + botr) / 2; //average of bottom LDRs int avgleft = (topl + botl) / 2; //average of left LDRs int avgright = (topr + botr) / 2; //average of right LDRs if (avgtop < avgbot) { servoverti.write(servov +1); if (servov > servovlimithigh) { servov = servovlimithigh; } delay(10); } else if (avgbot < avgtop) { servoverti.write(servov -1); if (servov < servovlimitlow) { servov = servovlimitlow; } delay(10); } else { servoverti.write(servov); } if (avgleft > avgright) { servohori.write(servoh +1); if (servoh > servohlimithigh) { servoh = servohlimithigh; } delay(10); } else if (avgright > avgleft) { servohori.write(servoh -1); if (servoh < servohlimitlow) { servoh = servohlimitlow; } delay(10); } else { servohori.write(servoh); } delay(50); }
REVIEW
Recent Blogs

Essential Compatibility Insights for Raspberry Pi 5: What You Need to Know Before Purchase
Discover how to fully harness the Raspberry Pi 5's capabilities, ensuring a smooth upgrade and maximizing your tech projects’ potential.
SELECTION GUIDE Raspberry Pi Apr 19 2024

How to Select SBC (Lattepanda/Raspberry Pi) for Local LLM (LLaMA, LLaMA2, Phi-2, Mixtral-MOE, etc.)
Discover why Lattepanda Sigma is well-suited for local large language model (LLM) operations. Explore its memory and storage capacities compared to other SBCs.
SELECTION GUIDE AI Mar 29 2024

Selection Guide of Linux Systems Compatible with RISC-V Architecture
This article will provide a detailed introduction to several versions of Linux systems, including Ubuntu, Debian, Fedora, OpenSuse, FreeBSD, and OpenBSD, and the compatibility with the RISC-V architecture.
SELECTION GUIDE Mar 27 2024

 Home
Home
 Category
Category
 Shopping Cart
Shopping Cart
 Me
Me