





TUTORIALS RoboticsArduino
OK, now rotate your robot and you have made a compass.
Some of the smartphoe alse have this problem, because the application developers didn’t do any intelligent tilt, if you rotate your smartphone like the picture above, maybe you will find the value is not correct.
#include <Wire.h>//add 2.0C library
#include <HMC5883L.h>//add hmc5883 library
Defines:
HMC5883L compass;// Store our compass as a variable.
Init HMC5883
compass = HMC5883L(); // Construct a new HMC5883 compass.
compass.SetScale(1.3);
compass.SetMeasurementMode(Measurement_Continuous);// Set the measurement mode to Continuous
Get the value
MagnetometerRaw raw = compass.ReadRawAxis();// Retrive the raw values from the compass
MagnetometerScaled scaled = compass.ReadScaledAxis();// Retrived the scaled values from the compass (scaled to the configured scale).
Deal with the value get (calculate the direction by the components of two axis)
float xHeading = atan2(scaled.YAxis, scaled.XAxis);
float yHeading = atan2(scaled.ZAxis, scaled.XAxis);
float zHeading = atan2(scaled.ZAxis, scaled.YAxis);
Deal with the value (invert the value into 0-2PI)
if(xHeading < 0) xHeading += 2*PI;
if(xHeading > 2*PI) xHeading -= 2*PI;
if(yHeading < 0) yHeading += 2*PI;
if(yHeading > 2*PI) yHeading -= 2*PI;
if(zHeading < 0) zHeading += 2*PI;
if(zHeading > 2*PI) zHeading -= 2*PI;
Change the value from radian into angle
float xDegrees = xHeading * 180/M_PI;
float yDegrees = yHeading * 180/M_PI;
float zDegrees = zHeading * 180/M_PI;
1. Make your robot go straightly toward east. And bypass objects.
Related Category: Robotic > Robot Platform
How to Play With MiniQ 2WD Complete Robot Kit v2.0- Lesson 8 (Compass)
DFRobot
Mar 24 2017 646
Key Points
Electric compass can be used in many situations of navigation. And it is so easy to get the direction value thanks to the development of science. Just look back to the great sailing ships era, people navigate according to the sun, the stars and life experiences, but they often make wrong judgments.So we live in a high technology century. And we can make a compass enabled technology robots ourselves!
You will:1. Learn how to use the compass sensor/chip2. Display the direction in computer
You will:
Upload the Code
Install the library: HMC5883L,

1. Library Route
Open hmc.ino, and upload the code:

2.upload the code
Open the serial monitor:

3. Value printed through serial monitor

4. The relationship between direction and value
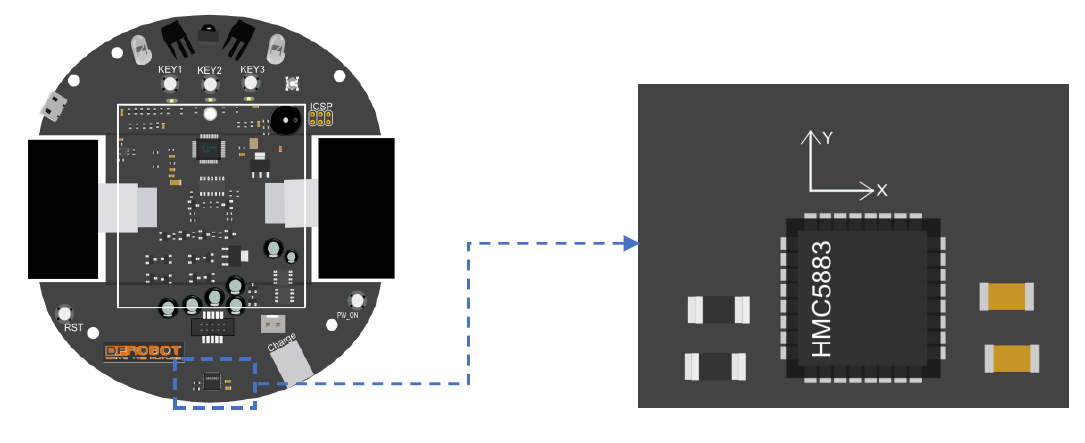
From the image upon we can know that if we get 0, it is north, and if we get 90, it is east. And be careful of the sensor direction in the robot, the x axis is nor as the same as the headstock, so if you get 90, it is 90-90=0, or if you get 270, it is 270-90=180, thus you can know the direction of you headstock.

5. The directionof every axis

6. The direction when robot towards west
OK, now rotate your robot and you have made a compass.
Tips:
1. Cause the compass sensor gets the value through geomagnetism, so you’d better not put any magnet goods near the sensor. And if you feel the value had anything wrong, check the object around.
2. And you must put your robot flatiy, or the value will be inaccuracy.
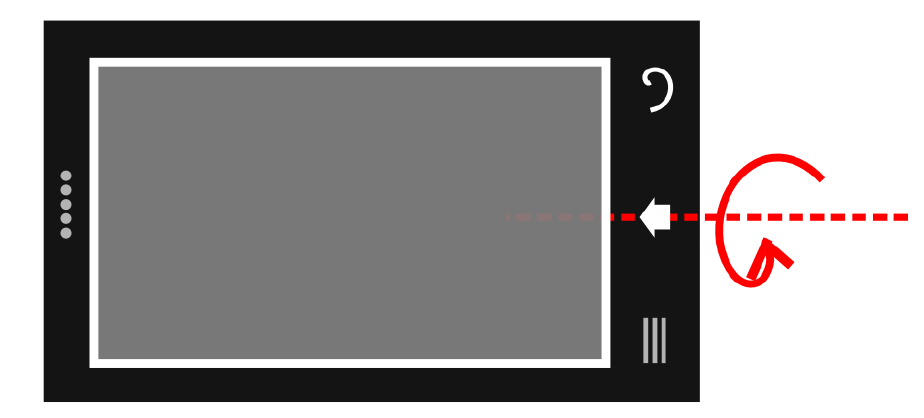
7 .Rotate your Smartphone
Some of the smartphoe alse have this problem, because the application developers didn’t do any intelligent tilt, if you rotate your smartphone like the picture above, maybe you will find the value is not correct.
4. If I need direction, can I just use a magnetoresistive sensor without a acceleration sensor.
Yes, of course. But you need to make your sensor in horizontal, that means, the pitch angle and the roll angle are both zaro.
5. Why I need a acceleration sensor?
If you want your sensor gives a right value no matter wheather it is in horizontal or not, you need a sensor to correct the error taken by tilt, so you need to know the titlt value, thus you need a acceleration sensor. Or Honeywell gives us a good solution, you can search HMC6343 which has acceleration and geomagnetic sensor inside to give a value with intelligent tilt.
Code Analysis
Import the libraries: #include <Wire.h>//add 2.0C library
#include <HMC5883L.h>//add hmc5883 library
Defines:
HMC5883L compass;// Store our compass as a variable.
Init HMC5883
compass = HMC5883L(); // Construct a new HMC5883 compass.
compass.SetScale(1.3);
compass.SetMeasurementMode(Measurement_Continuous);// Set the measurement mode to Continuous
Get the value
MagnetometerRaw raw = compass.ReadRawAxis();// Retrive the raw values from the compass
MagnetometerScaled scaled = compass.ReadScaledAxis();// Retrived the scaled values from the compass (scaled to the configured scale).
Deal with the value get (calculate the direction by the components of two axis)
float xHeading = atan2(scaled.YAxis, scaled.XAxis);
float yHeading = atan2(scaled.ZAxis, scaled.XAxis);
float zHeading = atan2(scaled.ZAxis, scaled.YAxis);
Deal with the value (invert the value into 0-2PI)
if(xHeading < 0) xHeading += 2*PI;
if(xHeading > 2*PI) xHeading -= 2*PI;
if(yHeading < 0) yHeading += 2*PI;
if(yHeading > 2*PI) yHeading -= 2*PI;
if(zHeading < 0) zHeading += 2*PI;
if(zHeading > 2*PI) zHeading -= 2*PI;
Change the value from radian into angle
float xDegrees = xHeading * 180/M_PI;
float yDegrees = yHeading * 180/M_PI;
float zDegrees = zHeading * 180/M_PI;
The library of HMC5883 helps do every to get the direction value, so you don’t need to do much complex things.
Circuit Design
HMC5883 is an integrated solution,so we don’t need to design a lot to make it work.

8. HMC5883
miniQ only connect SCL and SDA, the only two resistors are used for pull-up. So if you want to design HMC5883 module yourself, just use this circuit and it can work.
Continue Reading
1. Make your robot go straightly toward east. And bypass objects.
2. If you have a 3-axis acceleration sensor, try to use it together with HMC5883 to get a correct value of direction when your HMC5883 is not horizontal.
Related Category: Robotic > Robot Platform
Last Arduino MiniQ 2WD Tutorial: MiniQ 2WD Complete Robot Kit v2.0- Lesson 7(Encoder)
Next Arduino MiniQ 2WD Tutorial: MiniQ 2WD Complete Robot Kit v2.0- Lesson 9(Application Design: Catch the Ball)
Next Arduino MiniQ 2WD Tutorial: MiniQ 2WD Complete Robot Kit v2.0- Lesson 9(Application Design: Catch the Ball)
Robotics ProjectsRobotics ForumRobotics TutorialsRobotics ProductsView Arduino ProductsMore Arduino Related ProjectsArduino Tutorials
REVIEW
Related Product


Recent Blogs

Essential Compatibility Insights for Raspberry Pi 5: What You Need to Know Before Purchase
Discover how to fully harness the Raspberry Pi 5's capabilities, ensuring a smooth upgrade and maximizing your tech projects’ potential.
SELECTION GUIDE Raspberry Pi Apr 19 2024

How to Select SBC (Lattepanda/Raspberry Pi) for Local LLM (LLaMA, LLaMA2, Phi-2, Mixtral-MOE, etc.)
Discover why Lattepanda Sigma is well-suited for local large language model (LLM) operations. Explore its memory and storage capacities compared to other SBCs.
SELECTION GUIDE AI Mar 29 2024

Selection Guide of Linux Systems Compatible with RISC-V Architecture
This article will provide a detailed introduction to several versions of Linux systems, including Ubuntu, Debian, Fedora, OpenSuse, FreeBSD, and OpenBSD, and the compatibility with the RISC-V architecture.
SELECTION GUIDE Mar 27 2024

 Home
Home
 Category
Category
 Shopping Cart
Shopping Cart
 Me
Me