Introduction
This motor shield allows Arduino to drive two channel DC motors. It uses a L298N chip which deliveries output current up to 2A each channel.
Specifications
- Motor Driven Voltage: 4.8V to 35V
- Output Current: up to 2A/channel
- Total Power Dissipation: 25W(T=75℃)
- Driven Structure: Dual full-bridge driver
- Driven Power Port: External power terminal, or VIN from Arduino
- Driven Output Port: 2 channel screw terminals, or male PIN headers
- Control Port: 4 TTL Compatible digital signals (Digital 10-13)
- Operation Temperature: -25℃ to 130℃
- Shield Size: 56x57mm
Application
- Electric toy car
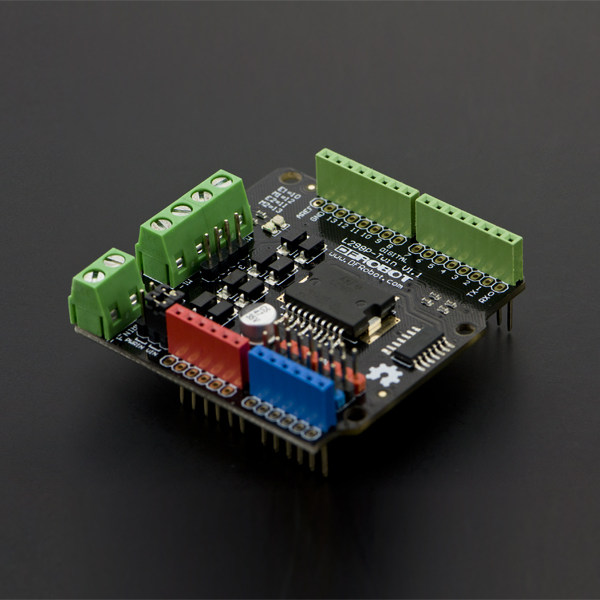
PinOut

- Power Selection Jumper: The motors can be powered by external power supply(PWMIN) or VIN from Arduino control board(e.g., UNO). Default is VIN showed by the diagram. Note: There are two jumpers in parallel that can afford heavy current.
PWMIN Terminal: Used to connect to external power.
Motor Terminal: Used to connect motors by screw terminals(M1- M1+ M2- M2+) or PIN headers(1 2 3 4).
Analog 3Pin Port: Used to connect sensors or actuators. Note: pinout is (+ - S).
Motor Indicator: The red LED lights if Mn+ is positive, whereas the green LED lights.
Control Port: Used to control speed and direction of motor. You can get port's description in the "Control Table" printed on the shield.
- Control Function Table:
| Name | Function |
|---|---|
| En | Mn Speed control(PWM) |
| Mn | Mn Direction Control |
- Control Signal Truth Table:
| En | Mn | State |
|---|---|---|
| L | X | Disable Mn |
| H | L | Mn Foreward(Mn+ is positive) |
| H | H | Mn Backward(Mn+ is negative) |
Note: n of "Mn" or "En" is 1, 2
Tutorial
DC Motor Control
Target: Control speed and direction of DC motor
Step1: Hardware List
- DF_UNO 1
- Micro Metal Gearmotor 2
- Regulated Power 1
- The Shield 1
- Wires
Step2: Software List
Step3: Wiring

Step4: Sample Code
- Open Arduino IDE
- Upload the code to UNO
/**set control port**/
const int E1Pin = 10;
const int M1Pin = 12;
const int E2Pin = 11;
const int M2Pin = 13;
/**inner definition**/
typedef struct {
byte enPin;
byte directionPin;
} MotorContrl;
const int M1 = 0;
const int M2 = 1;
const int MotorNum = 2;
const MotorContrl MotorPin[] = { {E1Pin, M1Pin}, {E2Pin, M2Pin} } ;
const int Forward = LOW;
const int Backward = HIGH;
/**program**/
void setup() {
initMotor();
}
void loop() {
int value;
/**test M1 **/
setMotorDirection( M1, Forward );
setMotorSpeed( M1, 100 );
delay(1000);
setMotorSpeed( M1, 0 );
delay(100);
setMotorDirection( M1, Backward );
setMotorSpeed( M1, 50 );
delay(1000);
setMotorSpeed( M1, 0 );
delay(100);
/**test M2**/
setMotorDirection( M2, Backward );
for (value = 0 ; value <= 100; value += 5) {
setMotorSpeed( M2, value );
delay(100);
}
setMotorSpeed( M2, 0 );
setMotorDirection( M2, Forward );
for (value = 0 ; value <= 100; value += 5) {
setMotorSpeed( M2, value );
delay(100);
}
setMotorSpeed( M2, 0 );
}
/**functions**/
void initMotor( ) {
int i;
for ( i = 0; i < MotorNum; i++ ) {
digitalWrite(MotorPin[i].enPin, LOW);
pinMode(MotorPin[i].enPin, OUTPUT);
pinMode(MotorPin[i].directionPin, OUTPUT);
}
}
/** motorNumber: M1, M2
direction: Forward, Backward **/
void setMotorDirection( int motorNumber, int direction ) {
digitalWrite( MotorPin[motorNumber].directionPin, direction);
}
/** speed: 0-100 * */
inline void setMotorSpeed( int motorNumber, int speed ) {
analogWrite(MotorPin[motorNumber].enPin, 255.0 * (speed / 100.0) ); //PWM
}Step5: Result
M1 will forward at full speed, and then half speed inversion; M2 velocity from fast to slow, reverse first, and then forward.
FAQ
More question and cool idea, visit DFRobot Forum
More Documents
 Get 2x2A Motor Shield For Arduino Twin from DFRobot Store or DFRobot Distributor.
Get 2x2A Motor Shield For Arduino Twin from DFRobot Store or DFRobot Distributor.
Category: DFRobot > Arduino > Arduino Shields