









Bionic Robot Hand (Right)


Introduction
Bionic Robot Hand is a five‑finger robotic manipulation system built with lightweight acrylic structures and integrated micro metal servos. The articulated mechanism combines precision servo actuation with mechanical joints to reproduce natural grasping motion while maintaining structural stability. Each finger operates independently, enabling flexible gesture control and object manipulation for robotics demonstrations and educational projects. Integrated compatibility with popular development platforms simplifies motion control, while support for dedicated servo controllers such as the 24 channel Veyron servo driver allows PC-based programming, wireless operation, and real‑time debugging for advanced robotic control experiments.

Note: Please be careful with servo control. Even with damping structures integrated in each finger, non‑standard operation may damage the servos.
Independent Five‑Finger Actuation for Realistic Motion
This articulated robotic hand mechanism integrates five micro metal servos connected through precision joints, allowing each finger to move independently within a defined range. Such architecture enables detailed gesture simulation, grasping demonstrations, and fine robotic manipulation experiments. Individual servo control also supports complex coordinated movements programmed through microcontroller platforms such as Arduino, providing a practical platform for studying multi‑axis motion control, robotic kinematics, and servo synchronization in advanced robotics prototypes.
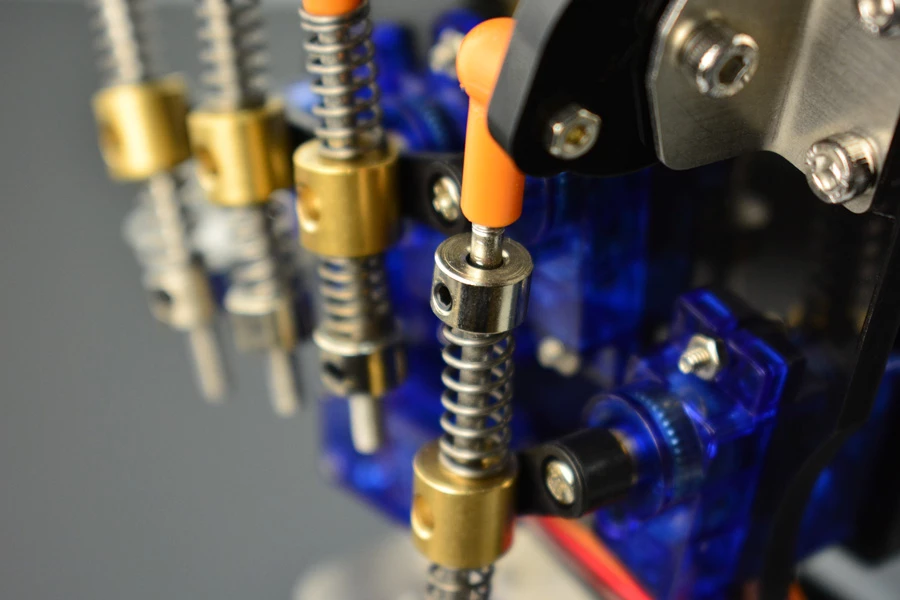
Spring Damping Structure for Mechanical Protection
Each finger integrates a dedicated spring damping mechanism that absorbs mechanical stress during gripping or unexpected impacts. This protective design reduces strain on internal servo gears and structural joints, increasing operational durability during repeated demonstrations or classroom experimentation. Such buffered articulation helps maintain stable motion performance even during frequent grasp cycles, making the robotic manipulator suitable for engineering education environments, laboratory prototypes, and robotics competitions where repeated motion testing is common.
Flexible Servo Control and Expansion Compatibility
This servo‑driven robotic manipulator supports multiple control approaches including PC software operation through the Veyron servo controller or embedded control through microcontrollers. Direct connection with expansion boards such as the Arduino IO expansion shield simplifies wiring and enables fast deployment for robotics experiments. Standard servo signaling and library support allow smooth integration with various microcontroller platforms, making the articulated robot hand suitable for robotics laboratories, motion control development, and programmable demonstration systems.
The acrylic robotic hand assembly provides a ready‑to‑use demonstration platform for robotics education, servo control research, and robotic manipulation experiments. With the ability to grasp objects weighing up to 500g, this programmable mechanical hand serves as an effective robotics teaching tool, engineering prototype component, or interactive exhibit illustrating principles of robotic motion, actuator coordination, and multi‑joint control systems.
Features
Applications
Specification
Red <-> VCC
Orange <-> Signal