The wires on my motor do not match the Product Wiki. They are Blue - Black - Yellow - Green - Red. They certainly can't be connected to an Arduino as they require 12V. What type of...
 JaneYu 2016-12-18 22:54:43 26 Views55 Replies
JaneYu 2016-12-18 22:54:43 26 Views55 Replies The wires on my motor do not match the Product Wiki. They are Blue - Black - Yellow - Green - Red. They certainly can't be connected to an Arduino as they require 12V. What type of connector does it use?
The spec sheet on this motor is poor. It's missing all kinds of information that I need to do a design. Giving me uncommented Aurdino code is not very helpful. Sending people to this forum to get technical info is also crazy. These are the questions I have and the information that should be in the data sheet.
1) Current draw of the motor is not in the spec sheet. What is the draw running, and standing still. (If standing still is even a possibility)
2) How does PWM control speed. Is it truly Pulse Width that matters? How does pulse width relate to speed? Does zero width mean zero speed? How slow can the motor go? Will it actively hold it's position? Or does each pulse cause the motor to move some incremental amount, in which case frequency would really be the controlling factor?
3) What are the characteristics of the encoder output? Is a symmetric square wave? Is it a narrow pulse? What polarity? Is it bounceless or does it need to be filtered? Is there a way to tell direction from the encoder output? What is the impedance of that output? It was unclear in the spec sheet what a 'cycle' is. Apparently it's a rotation of the motor, not the output shaft?
This looks like an excellent motor (maybe), and I'd like to order about 100 of them to make electronic window shades, but I'm not even sure it's worth designing for these motors with so many unknowns in the specifications. This motor is for sale on many different sites. I can't believe you guys haven't put a little effort into writing a decent spec sheet.
Just my 2 cents.
JaneYu Hi, I was wondering what temperature I can heat the motor to before damaging it? Thanks.
JaneYu The working voltage of this motor is -10~+60℃.
We recommend that you do not use it at temperatures beyond this range.
Operating Voltage: 12V
Stall current: 0.7A
So the stall power of this motor is 8.4Watt
And the speed of it is about 159 rpm/min.
JaneYu Hi, I am planning to use this motor for the project which requires to count number of revolutions. I tried counting interrupt signal for encoder through FG pin, but it seems like it doesn't work like normal hall effect sensor encoder or optical encoder works . How can I use this motor's encoder for counting revolutions per cycle?
JaneYu Please refer to our wiki for the calculation formula.
https://wiki.dfrobot.com/FI...
https://uploads.disquscdn.c...
What is the diameter of the shaft?
JaneYu The size drawing is posted on our wiki.
https://wiki.dfrobot.com/FI...
The diameter of the shaft is 4mm.
Hey,
I have a query regarding this motor : SKU-FIT0441 BLDC Motor
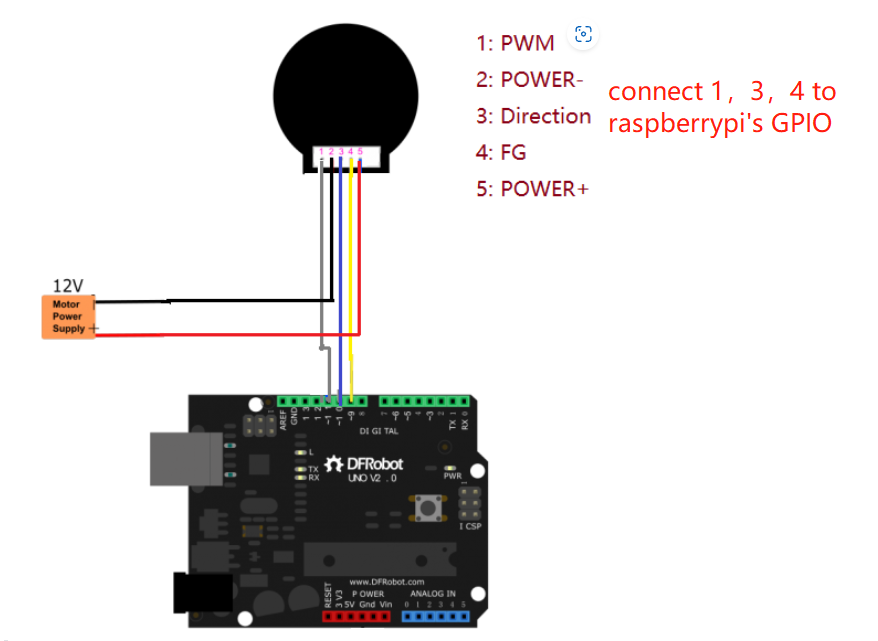
My application for this motor requires to connect it with a Raspberry Pi 4B. Will it be compatible with it?, as the Datasheet only mentions work with Arduino.
And can I employ a separate external Motor driver(Arduno BTS7960B 5V Motor driver module) to govern the motor speed, or is it just not possible to overcut the internal controller (Specs on the internal motor driver will really be helpful)?
I hope someone can clarify this.
Thanks.
JaneYu You can try driving a motor using the Raspberry Pi's GPIO pins. By utilizing the RPi.GPIO library, set the motor's PWM and direction to OUTPUT, and configure the PG as pull-up.
https://uploads.disquscdn.c...
The documentation has no inclusion of the gearbox length (distance L in the linked product Wiki). Does anyone know what this distance is?
JaneYu Does anyone know the the connector type on either end of the cable?
Or even just the gauge, so I can get correct connectors.
Thank you.
JaneYu Could you please give some information about the encoder? how many ppr does it have and it is inceremental or absolute?
JaneYu After testing, I don't think there is an encoder. The output pulses are probably just from 6 step commutation
Input shaft speed: 7300rpm max
Gear ratio: 45
PPR (on input shaft): 6
Encoder behaviour: gives you only pulses, not direction AND the feedback pin only works while in motion
Hello,
I was wondering if I could have the stator flux density(in Tesla) , the number of turns N and the area A of the inductance.
Thank you!
JaneYu Hi,
I have a strange problem where the motor has problem restarting after being idle for a few seconds. And it only happens when I try to turn in CCW (direction pin goes high). The signal is sent through my microcontroller (stm32f411re).
Here's the stranger thing: if I hook the pwm wire straight to gnd, and direction pin straight to 5V or 0V, it works.
I understand that motor is active low.
JaneYu I'm experiencing the same thing Trần. I find that I can usually get it to wake back up by flipping the direction pin for a few microseconds.
Hello
Could you tell me the motor constant, resistance and rated torque values if available (I believe 2.4 kg-cm is the stall torque, is this correct ?)
Thank you
JaneYu Hi. I got one of these motors and plugged it in to an Arduino Uno and it works great - smooth, torquey and quiet. I can control the speed and direction. But in your sample code I don't understand what you are doing in the j loop. Why loop 8 times on pulseIn? What is the right bit shift (i = i >> 3) doing? Why divide 111111 by i ? And finally, why is cycle = 2 * i ? THanks so much!
JaneYu Hi,
Sorry for the inconvenience. We have asked for the parameters you require to the product manager since it is an agent product. It will take some time and we will reply to you as soon as we get response.
JaneYu 

{kind=link}
{kind=link}