New: seeMote Cube for visionOS Developers - Build physical input for Apple Vision Pro apps. Learn More ›
PROJECTS RoboticsArduino Besides its look, one of important features is the special penguin step, which makes the robot lovely. Therefore, I stress the wobbly step a lot. Fortunately, I found here comes with chirps when the robot shakes its head, the friction between gear and wooden structure during the working progress. The natural penguin-style sound helps me a lot.
1. Romeo BLE mini - Small Arduino Robot Control Board with Bluetooth 4.0
3. Make direction control parts.
How to make a Wobbly Penguin Arduino Robot
DFRobot
Jul 18 2017 264603
Summer comes with increasing heat, as a diligent DIY fan how could I do nothing but just eat ice cream?I need to design a small present to you and myself, something cute and interesting, how about a small penguin? Guess that it stands in front of you and winks, sayin‘May I help you?

Besides its look, one of important features is the special penguin step, which makes the robot lovely. Therefore, I stress the wobbly step a lot. Fortunately, I found here comes with chirps when the robot shakes its head, the friction between gear and wooden structure during the working progress. The natural penguin-style sound helps me a lot.
Come to check my work!
I used to choose normal Arduino UNO as the main board in the beginning. However, Arduino UNO does not have in-built motor drive chip and it is too large, I have to buy an extra motor drive expansion board, which is expensive and hard to connect. Luckily, I found Romeo BLE mini board is so appropriate for my project. The mini board is fully compatible with Aruino UNO and with in-built motor drive chip, small and easy to install. In the result, I chose Romeo BLE mini board as the core board without any hesitation.
Hardware in need:
1. Romeo BLE mini - Small Arduino Robot Control Board with Bluetooth 4.0
(The board compatible with ArduinoUNO and integrats 2 way DC motor driver, independent power supply of Bluetooth and gear, becoming more powerful)
2. TowerPro SG90C 360 Degree Micro Servo (1.6Kg)
3. TT Motor with Encoder (6V 160RPM 120:1)
4. Wooden infrastructure component
5. Colorful connections printed by overlord 3D printer ×2
*Click here to download document for 3D printing.
*Click here to download 3D design sketch.
*Click here to download CAD document for laser cutting.
The penguin robot can promoted to test temperature with DS18B20 Temperature Sensor and LCD display screen.

The penguin robot can promoted to test temperature with DS18B20 Temperature Sensor and LCD display screen.
Working Process:
1. Take wooden infrastructure component.

2. Build motor parts.





3. Make direction control parts.


]
4. Complete machine assembly.



5. Complete robot penguin look.

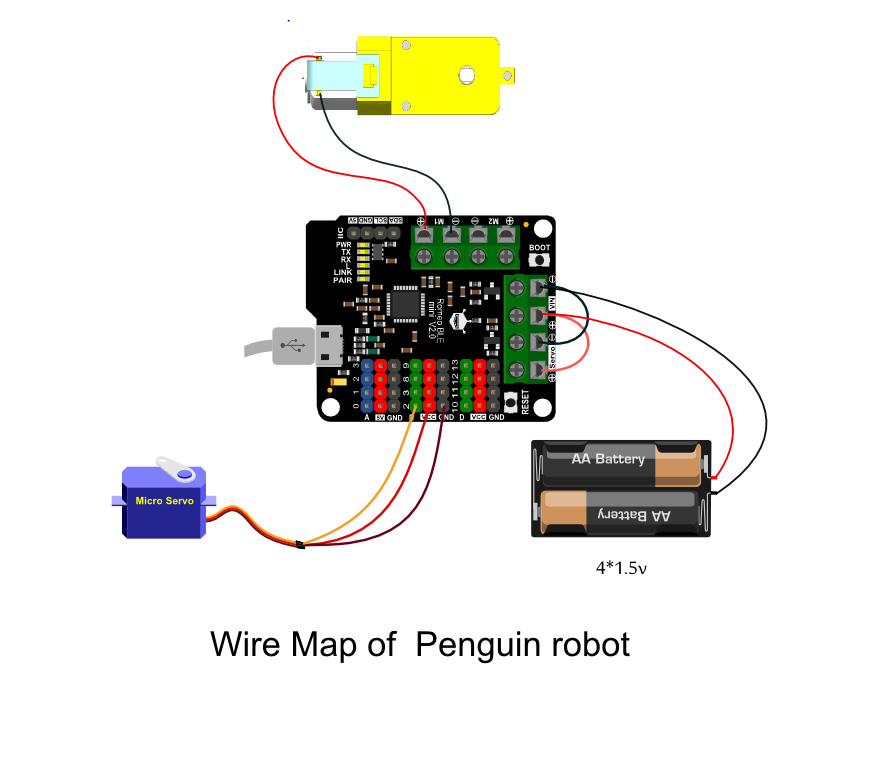
6. Connect electric circuit.

The code in need is as below:
/*! * @file PenguinROBOT.ino * @copyright [DFRobot]([url=http://www.dfrobot.com]http://www.dfrobot.com[/url]), 2017 * * @author [sc.mingyang] * @version V1.0 * @date 2017-07-7 */ #include Servo myservo; void setup() { pinMode(3,OUTPUT); pinMode(5,OUTPUT); myservo.attach(2); digitalWrite(3,LOW); digitalWrite(5,HIGH); } void loop() { for(int x=1; x<10; x++) { myservo.write(75); //[/b][b]experimental result[/b][b] delay(500); myservo.write(135); delay(500); myservo.write(115); delay(500); myservo.write(115); delay(500); } myservo.write(75); //Turn right delay(3000); myservo.write(135);//Turn left delay(3000); myservo.write(105); // Go straight delay(8000); }Related Product




Recent Blogs

Hands-On Test of 6 New 4K USB Cameras: Resolution, Color, Field of View, and Compatibility
Compare six 4K USB cameras using IMX415, IMX274, and IMX678 sensors across resolution, color, field of view, distortion, Linux, and low-light tests.
REVIEWS Jul 23 2026

Fermion BMI323 6-Axis IMU Engineering Test Notes: Accelerometer, Gyroscope, Step Counter, and I2C Address Verification
This article is an engineering test note, mainly intended to demonstrate the actual performance of the module in common development scenarios, rather than a laboratory calibration report.
REVIEWS Jul 15 2026

Meet DFRobot at FAB26 Boston 2026: AI, Open-Source Hardware & Maker Education
Visit DFRobot at FAB26 Boston for hands-on AI workshops, open-source hardware demos, and practical insights into K–12 maker education.
NEWS Jul 15 2026