In modern solar tracking systems, the solar panels are fixed on a structure that moves according to the position of the sun. Let us design a solar tracker using two servo motors, a light sensor consisting of four mini photocells and Arduino UNO board.
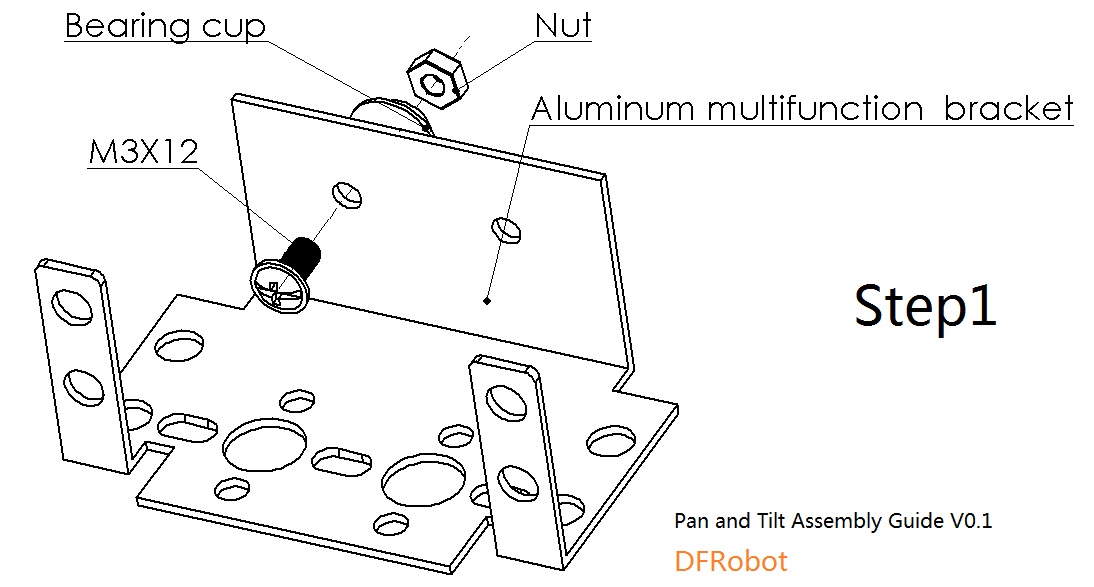
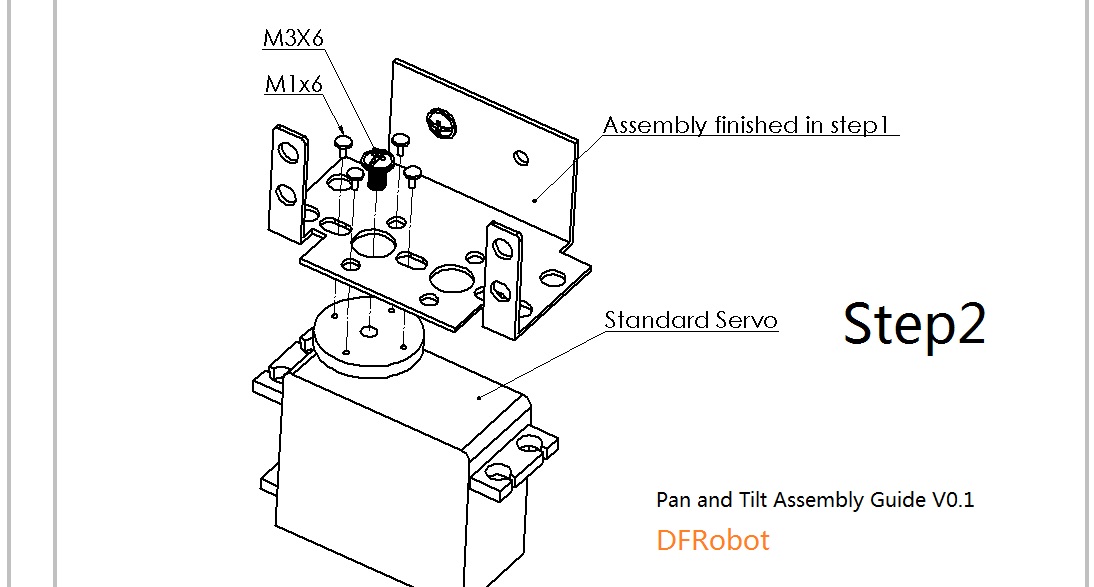
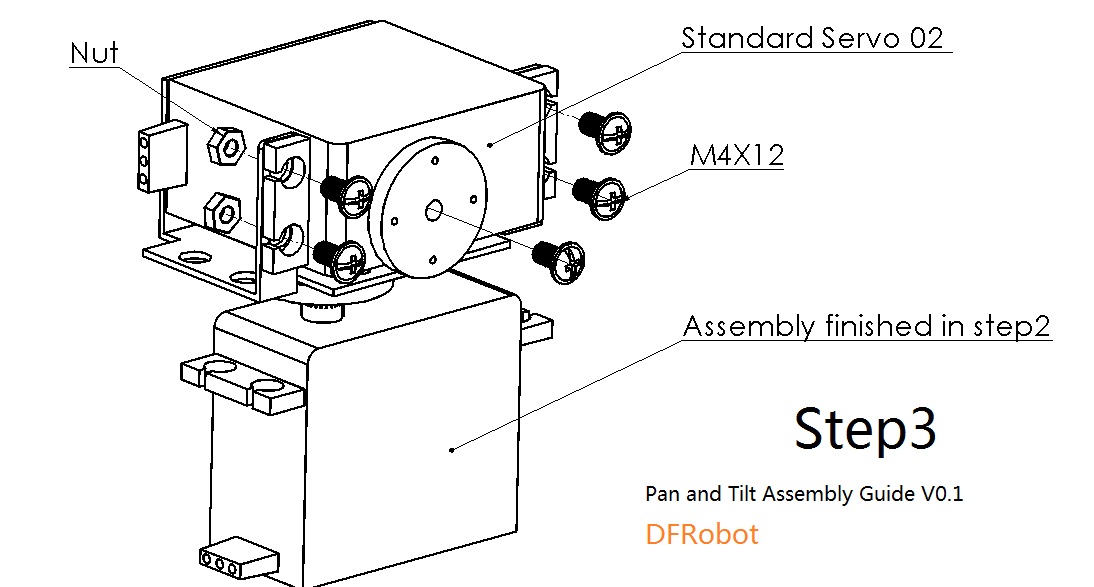
Follow the steps in the images above and assemble the parts.
Remember: Use rubber spacers when using the M1x6.
Connections
Stack the I/O Expansion Shield on the Arduino. Connect lower servo with D9 in shield. Connect upper servo with D10 in shield. Take +5V and GND to power rails in breadboard. Connect +5V in breadboard to each photocell. Connect upper left photocell to A0. Connect upper right photocell to A1. Connect lower right photocell to A2. Connect lower left photocell to A3. Connect GND terminal of each photocell to GND with 10k Ohm resistor in series.
Fixing and Testing
Fix the Solar Panel on a cardboard and paste it on the face of upper servo. Take out all the wires and give them a play so as to move about 180 degrees. Put the system on a stable platform. Upload the code and test it with a bright LED or a bulb.
Schematics
CODE
#include
Servo servohori;
int servoh = 0;
int servohlimithigh = 180;
int servohlimitlow = 0;
Servo servoverti;
int servov = 0;
int servovlimithigh = 180;
int servovlimitlow = 0;
//Assigning LDRs variables
int ldrtopl = 0;
int ldrtopr = 1;
int ldrbotr = 2;
int ldrbotl = 3;
void setup() {
servohori.attach(10);
servohori.write(0);
servoverti.attach(9);
servoverti.write(0);
}
void loop() {
/* code */
servoh = servohori.read();
servov = servoverti.read();
//capturing analog values of each LDR
int topl = analogRead(ldrtopl);
int topr = analogRead(ldrtopr);
int botl = analogRead(ldrbotl);
int botr = analogRead(ldrbotr);
// calculating average
int avgtop = (topl + topr) / 2; //average of top LDRs
int avgbot = (botl + botr) / 2; //average of bottom LDRs
int avgleft = (topl + botl) / 2; //average of left LDRs
int avgright = (topr + botr) / 2; //average of right LDRs
if (avgtop < avgbot)
{
servoverti.write(servov +1);
if (servov > servovlimithigh)
{
servov = servovlimithigh;
}
delay(10);
}
else if (avgbot < avgtop)
{
servoverti.write(servov -1);
if (servov < servovlimitlow)
{
servov = servovlimitlow;
}
delay(10);
}
else
{
servoverti.write(servov);
}
if (avgleft > avgright)
{
servohori.write(servoh +1);
if (servoh > servohlimithigh)
{
servoh = servohlimithigh;
}
delay(10);
}
else if (avgright > avgleft)
{
servohori.write(servoh -1);
if (servoh < servohlimitlow)
{
servoh = servohlimitlow;
}
delay(10);
}
else
{
servohori.write(servoh);
}
delay(50);
}
This article is an engineering test note, mainly intended to demonstrate the actual performance of the module in common development scenarios, rather than a laboratory calibration report.